Đồ án tốt nghiệp SV Nguyễn Văn Khá i GIẤY ĐĂNG KÝ KHÓA LUẬN TỐT NGHIỆP HỌ VÀ TÊN SINH VIÊN MSSV LỚP Đã đăng ký với giảng viên và được giảng viên đồng ý hướng dẫn khóa luận tốt nghiệp với tên đề tài là Ngày tháng năm 2018 Giảng viên Phần bổ sung dành cho sinh viên làm KLTN có mô hình Sinh viên xin đăng ký làm khóa luận tốt nghiệp có mô hình và tự chịu chi phí để thực hiện mô hình Ngày tháng năm 2018 Sinh viên ký và ghi rõ họ tên Đồ án tốt nghiệp SV Nguyễn Văn Khá ii NHẬN XÉT GIÁO VIÊN HƯỚNG DẪN Đ.
TỔNG QUAN VỀ ĐỀ TÀI
Đặt vấn đề
Ngày nay, ngành điện đang phát triển mạnh mẽ và đóng vai trò quan trọng trong quá trình công nghiệp hóa hiện đại hóa đất nước, đặc biệt là ở Việt Nam Để nâng cao vị thế cạnh tranh với các quốc gia có nền công nghiệp hiện đại, ngành tự động hóa cần được phát triển và hiện đại hóa, đồng thời tiếp thu công nghệ tiên tiến và đào tạo đội ngũ kỹ sư chất lượng cao Ngành điện tự động tại Việt Nam đang được ứng dụng rộng rãi trong nhiều lĩnh vực, mang lại độ chính xác và hiệu quả cao trong sản xuất, giảm chi phí lao động và nâng cao năng suất Xuất phát từ thực tế này, tôi nhận thấy đề tài “Lập trình hệ thống tự động hóa sản xuất ứng dụng PLC MELSEC iQ-R” có tính thực tiễn cao và khả năng ứng dụng rộng rãi trong tương lai, vì vậy tôi quyết định thực hiện đề tài này.
“Lập trình hệ thống tự động hóa sản xuất ứng dụng PLC MELSEC iQ-R”.
Mục tiêu của đề tài
Sau khi hoàn thành đề tài, mục tiêu đạt được là áp dụng quy trình công nghệ vào mô hình và tiến hành SCADA để điều khiển giám sát Người học sẽ hiểu rõ về quá trình làm việc của hệ thống, từ đó nắm bắt được ứng dụng và cách thức hoạt động của thiết bị điều khiển khả trình PLC MELSEC iQ-R cùng các thiết bị tự động hóa khác như biến tần, encoder và cảm biến Đồng thời, người học cũng sẽ hiểu và áp dụng các phần mềm SCADA nói chung, đặc biệt là các phần mềm SCADA của Mitsubishi.
Phương pháp nghiêm cứu
Kế thừa từ các tài liệu, công trình nghiên cứu trước đó về tự động hóa, điều khiển biến tần, nhận tín hiệu analog và các thiết bị khác
Phương pháp thực nghiệm kiểm chứng
Tiến hành không ngừng thực nghiệm trên mô hình, thông qua thực nghiệm để rút ra kinh nghiệm và kết luận.
Thời gian nghiên cứu
Thời gian nghiên cứu đề tài được chia ra làm các giai đoạn:
- Giai đoạn 1: tìm hiểu về các thiết bị ngoại vi, các thiết bị cấp nguồn, tìm hiểu về các cơ cấu chấp hành, thiết vị nhận tính hiệu
- Giai đoạn 2: Tìm hiểu về thiết bị lập trình PLC iQ-R Bao gồm tình hiểu về tính năng, khả năng ứng dụng, phương pháp kết nối
- Giai đoạn 3: Tiến hành thi công, kết nối phần cứng, thiết bị lập trình với các cơ cấu chấp hành và cảm biến
- Giai đoạn 4: Tìm hiểu về các phần mềm lập trình, thiết kế và giám sát SCADA
- Giai đoạn 5: Tiến hành lập trình thiết kế giao diện Viết báo cáo.
Ý nghĩa khoa học và thực tiễn của đề tài
Điều khiển tự động đang trở thành xu hướng phát triển không thể thiếu trong ngành công nghiệp và đời sống hàng ngày nhờ vào những lợi ích vượt trội của nó Trong các hệ thống tự động quy mô vừa và lớn, PLC được sử dụng làm thiết bị điều khiển chính Việc ứng dụng PLC iQ-R vào tự động hóa là một lĩnh vực mới mẻ, tiên phong trong việc tích hợp PLC iQ-R vào sản xuất, nhằm xây dựng hệ thống điều khiển tự động hoàn chỉnh về cả chức năng và hiệu quả kinh tế.
Đề tài này tập trung vào nhu cầu thực tế từ các nhà máy và dây chuyền sản xuất, đang trong quá trình nâng cấp và mở rộng để đáp ứng yêu cầu thị trường.
CƠ SỞ LÝ THUYẾT
Thiết bị điều khiển PLC MELSEC iQ-R
2.1.1 Giới thiệu sê ri PLC MELSEC iQ-R
2.1.1.1 Khái niệm PLC và dòng iQ-R
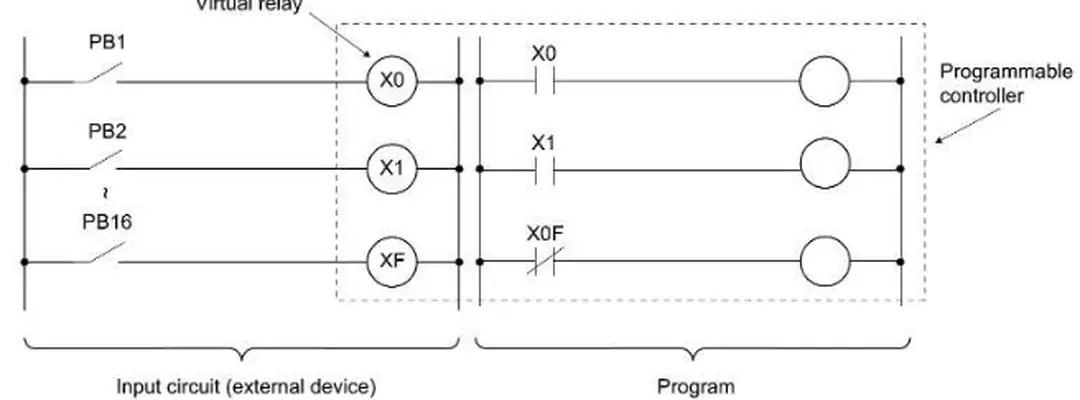
PLC, hay bộ điều khiển lập trình, là thiết bị cho phép người dùng lập trình để thực hiện các sự kiện theo trình tự Những sự kiện này được kích hoạt bởi các tín hiệu đầu vào hoặc qua các hoạt động như thời gian định thì và đếm sự kiện Khi sự kiện xảy ra, trạng thái của PLC sẽ chuyển sang ON hoặc OFF Bộ điều khiển lập trình sẽ liên tục lặp lại chương trình đã được lập trình, chờ nhận tín hiệu đầu vào và xuất tín hiệu đầu ra theo thời gian đã định.
Cấu trúc của bộ điều khiển lập trình (PLC) bao gồm các thành phần chính, trong đó bộ phận lưu trữ và xử lý chương trình được gọi là Main processing hay CPU Lập trình cho PLC liên quan đến việc xác định các điều kiện tín hiệu ngõ vào để điều khiển đối tượng, từ đó tạo ra tín hiệu ngõ ra tương ứng.
Bộ điều khiển khả trình Mitsubishi, hay còn gọi là bộ điều khiển khả trình tự động hóa (PAC), được sử dụng rộng rãi để thực hiện tự động hóa trong nhiều ứng dụng và tình huống khác nhau.
Mô đun sê-ri MELSEC iQ-R, ra mắt vào năm 2014, là bộ điều khiển khả trình thế hệ mới, đánh dấu bước đột phá trong tự động hóa cho hệ thống quy mô trung bình và lớn Được phát triển dựa trên nền tảng PLC trước đó, hệ thống này không chỉ cải tiến hiệu suất mà còn giải quyết những vấn đề phổ biến mà khách hàng thường gặp phải.
Hình 2.1 Ưu điểm của iQ-R
Năng suất: cải tiến năng suất thông qua hoạt động chức năng tiên tiến Có hệ thống mạng tốc độ cao, điều khiển chuyển động tiên tiến
Kỹ thuật giảm chi phí phát triển thông qua công nghệ kỹ thuật trực quan đang trở thành tiêu chuẩn trong sản xuất hiện đại Phần mềm kỹ thuật, như GX Works3 của Mitsubishi Electric, đóng vai trò quan trọng trong hệ thống điều khiển, từ thiết kế đến vận hành và bảo trì Phiên bản mới nhất này được thiết kế đặc biệt cho hệ thống điều khiển MELSEC iQ-R Series, mang đến nhiều tính năng và công nghệ tiên tiến, giúp đảm bảo giải pháp môi trường kỹ thuật hiệu quả và không gặp rắc rối.
Bảo trì hiệu quả giúp giảm chi phí và thời gian dừng máy, đồng thời tận dụng các tính năng bảo trì dễ dàng hơn Trong sản xuất, việc dừng máy hiếm khi xảy ra, nhưng hệ thống kiểm soát đôi khi cần bảo trì, như khi sản phẩm gặp lỗi hoặc cần nâng cấp để sản xuất thành phần mới Nhờ vào các chức năng bảo trì tích hợp trong phần cứng và phần mềm, người sử dụng có thể tin tưởng vào hệ thống điều khiển để quản lý quá trình chuyển đổi trong và ngoài thời gian bảo trì, cả trước và sau khi bảo trì.
+ Biểu đồ hóa dữ liệu sản xuất trong thời gian thực
+ Ngăn chặn thời gian chết của hệ thống với theo dõi rơle
+ Có bộ nhớ cho phép xác nhận các vấn đề hoạt động
Mạng liền mạch trong sê-ri MELSEC iQ-R giúp giảm chi phí hệ thống và kết nối hiệu quả qua nhiều cấp độ tự động hóa Giao thức SLMP cho phép dòng dữ liệu giữa mức cảm biến và quản lý trở nên rõ ràng thông qua các mạng tự động hóa công nghiệp CC-Link, mạng công nghiệp hàng đầu tại Châu Á, cung cấp tốc độ truyền dữ liệu nhanh, tối ưu hóa chu trình sản xuất Bên cạnh đó, mạng điều khiển chuyển động SSCNET 3/H nâng cao khả năng kết nối toàn nhà máy.
Tính tương thích trong việc tích hợp hệ thống hoặc công nghệ mới vào quy trình sản xuất hiện tại là yếu tố quan trọng Để đáp ứng nhu cầu sản xuất ngày nay, việc tối ưu hóa việc sử dụng các tài sản hiện có là điều bắt buộc Dòng sản phẩm iQ-R của MELSEC đáp ứng những yêu cầu này bằng cách cung cấp phần cứng hệ thống và khả năng tương thích dự án kỹ thuật, giúp dễ dàng chuyển đổi sang công nghệ tiên tiến và nâng cao năng suất.
Hệ thống PLC MELSEC iQ-R nổi bật với hai khía cạnh chất lượng cơ bản: “chất lượng sản phẩm” và “chất lượng để áp dụng” Với nhiều chức năng được thiết kế tối ưu, MELSEC iQ-R không chỉ nâng cao năng suất sản xuất mà còn đảm bảo duy trì chất lượng công nghiệp cao, phù hợp với các môi trường khắc nghiệt mà PLC hoạt động hàng ngày.
Bảo mật sở hữu trí tuệ hiện nay rất quan trọng, vì việc truy cập trái phép hoặc sai sót của người dùng có thể ảnh hưởng đến an toàn của hệ thống điều khiển Dòng sản phẩm iQ-R cung cấp các tính năng như chìa khóa phần cứng và phần mềm để bảo vệ sở hữu trí tuệ, cũng như quản lý quyền truy cập theo cấp người dùng trong thiết kế.
2.1.2 Các Mô đun được sử dụng
Hệ thống điều khiển mô đun MELSEC iQ-R được thiết kế với các mô đun đa dạng như CPU, nguồn điện, I/O kỹ thuật số, I/O analog và Base unit, cùng với các mô đun chức năng thông minh, mỗi bộ đảm nhận một nhiệm vụ riêng Trung tâm của hệ thống là Base unit, kết nối tất cả các mô đun và cho phép truyền thông tốc độ cao giữa chúng Với khả năng mở rộng linh hoạt, hệ thống có thể mở rộng từ nhỏ đến lớn, cho phép kết nối tối đa bảy Base unit mở rộng và lắp đặt lên đến 64 mô đun cùng lúc Đặc biệt, Base unit mở rộng R-Q cũng được cung cấp để đảm bảo tương thích với các mô đun sê-ri MELSEC-Q hiện có.
Dòng sản phẩm MELSEC iQ-R bao gồm nhiều bộ điều khiển tự động lập trình, đáp ứng nhu cầu kiểm soát tự động hóa đa dạng Sản phẩm tập trung vào hai lĩnh vực chính: bộ điều khiển hiệu suất cao với dung lượng bộ nhớ khác nhau và bộ điều khiển chuyển động chính xác cao với các trục điều khiển có thể điều khiển được Cấu trúc của dòng sản phẩm được thiết kế xung quanh hệ thống bus tốc độ cao MELSEC iQ-R, đảm bảo hiệu năng cao và khả năng xử lý thông minh Ngoài ra, dòng sản phẩm còn cung cấp các CPU ứng dụng cụ thể như CPU an toàn hỗ trợ tiêu chuẩn an toàn chức năng, CPU điều khiển quá trình hỗ trợ tối đa 500 vòng PID và hoán đổi nóng các mô đun I/O.
C Controller ( cung cấp lập trình ngôn ngữ C lý tưởng để chuyển đổi từ máy tính cá nhân hoặc các hệ thống điều khiển vi)
Mô đun điều khiển khả trình R04ENCPU
Hình 2.2 Mô đun iQ-R R04ENCPU
1 READY LED Chỉ ra tình trạng hoạt động của mô đun CPU và mức độ lỗi
- Trạng thái READY LED-ERROR LED
On - off: Hoạt động bình thường
On - nhấp nháy: Lỗi trung bình Nhấp nháy – on
Nhấp nháy(2s) – Off : Xử lý ban đầu Off -on / nhấp nháy: Lỗi chính
Cho biết tình trạng hoạt động của chương trình
Bật: Được thực thi (RUN state) Đang nhấp nháy: Đang tạm ngưng (PAUSE state) Tắt: Ngưng (STOP state) hoặc dừng lỗi
Cho biết trạng thái của trình báo cáo (F)
Bật: Trình báo cáo (F) ON Tắt: Hoạt động bình thường
Cho biết trạng thái pin
Nhấp nháy: Pin yếu Tắt: Hoạt động bình thường
Cho biết trạng thái có của thẻ nhớ SD
Bật: Có thẻ nhớ Nhấp nháy: đã sẵn sàng Tắt: Không có hoặc được không chèn
Cho biết trạng thái truy cập của thẻ nhớ SD
Bật: Được truy cập Tắt: Không truy cập
Tình trạng đầu vào và đầu ra bên ngoài yêu cầu phải bật hoặc tắt chức năng Đèn nhấp nháy với tần suất mỗi 200ms cho biết chức năng đang được thực hiện và đã được đăng ký.
Khi chức năng không được thực hiện, trạng thái của chức năng thiết lập trong cài đặt hiển thị LED được chỉ ra
9 SPEED LED Tốc độ vs dữ liệu
Một công tắc để kiểm soát tình trạng hoạt động của mô đun CPU
RUN: Thực hiện chương trình
RESET: Đặt lại mô-đun CPU (Giữ lại công tắc ở vị trí RESET trong khoảng một giây.)Điều khiển nút RUN / STOP
/ RESET bằng ngón tay của bạn Để tránh chuyển đổi khỏi bị hư hỏng, không sử dụng bất kỳ dụng cụ nào như tua vít
12 Nút kiểm soát truy cập thẻ nhớ
Chuyển đổi để vô hiệu hóa quyền truy cập vào thẻ nhớ SD để loại bỏ nó khỏi mô-đun CPU
13 Khe cắm thẻ nhớ SD
Khe cắm thẻ nhớ SD
14 Cổng USB Đầu nối cho thiết bị ngoại vi tương thích USB (loại đầu nối: miniB)
21 Đánh dấu thông tin sản xuất
Hiển thị thông tin sản xuất (16 chữ số) của mô đun
22 Phần mạng Khối RJ71EN71
Bảng 2.1 Miêu tả CPU R04ENCPU
R04ENCPU là loại CPU phổ biến nhất, đóng vai trò quan trọng trong việc điều khiển chương trình và thực hiện nhiều nhiệm vụ kiểm soát Đặc biệt, CPU này được tích hợp CC-Link IE, giúp giảm chi phí phần cứng cho các mô đun giao tiếp.
Các thông số kỹ thuật
Phương pháp kiểm soát hoạt động Hoạt động chương trình được lưu trữ chu kỳ
Chế độ làm mới (Đầu vào / đầu ra truy cập trực tiếp có sẵn bằng cách xác định đầu vào / đầu ra truy cập trực tiếp (DX, DY).)
Thời gian xử lý lệnh LD X0 0.98ns
Thời gian xử lý lệnh (văn IF 1.96ns
Năng lực chương trình 40K steps (160K bytes)
Bộ nhớ chương trình 160K bytes Thẻ nhớ SD
Tùy thuộc vào thẻ nhớ SD được sử dụng (Thẻ nhớ SD / SDHC: Tối đa 32G byte)
Bộ nhớ thiết bị / nhãn
Toàn bộ 400K bytes Khu vực thiết bị
Khu vực lưu trữ tệp
Bộ nhớ dữ liệu 2M byte
1072K byte (536K từ) (bao gồm vùng truyền thông cố định quét (24K từ))
Làm mới bộ nhớ 2048K byte
Số lượng tệp lưu trữ
Số lượng tệp chương trình, FB: số tệp FB)
188 (P: 124, FB: 64 (Một tệp FB có thể lưu trữ 64 khối chức năng.))
Bộ nhớ thiết bị / nhãn (khu vực lưu trữ tệp)
324 (có hoặc không có khay SRAM mở rộng)
・NZ1MEM-4GBSD, NZ1MEM-8GBSD, NZ1MEM-16GBSD: 32767
Số thư mục có thể lưu trữ Bộ nhớ dữ liệu 256
・NZ1MEM-4GBSD, NZ1MEM-8GBSD, NZ1MEM-16GBSD: 32767 cổng USB Tốc độ cao USB2.0 (miniB) × 1
Cổng mạng Rack internet RJ45
Năm, tháng, ngày, giờ, phút, giây và ngày trong tuần (điều chỉnh năm nhuận tự động)
Số điểm I / O chiếm dụng RnENCPU (phần mạng): 32 điểm
Thời gian mất điện tức thời cho phép
Thời gian khác nhau tùy thuộc vào module cung cấp điện được sử dụng
Tiêu thụ dòng trong (5VDC) ・RnENCPU: 1.49A
Chiều cao 106mm (Phần gắn trên đơn vị: 98mm)
Bảng 2.2 Thông số kỹ thuật R04ENCPU
Các thiết bị có trong CPU dành cho người dùng
Ngõ vào do mô đun CPU cung cấp để nhận các lệnh hoạt dữ liệu từ bên ngoài
Hình 2.3 Ngõ vào input nhận tín hiệu từ bên ngoài
Tín hiệu đưa kết quả tín toán của chương trình ra các thiết bị bên ngoài như đèn, relay…
M được sử dụng như relay phụ của chương trình , với chức năng đóng ngắt nội bộ
L là relay phụ trợ cho phép giữ dữ liệu trong thời gian mất điện
Thiết bị này hoạt động như một phụ kiện cho CPU, giúp làm mới dữ liệu bit giữa các mô đun mạng, chẳng hạn như mô đun mạng CC của Bộ điều khiển mạng IE và mô đun CPU.
Cờ báo F là một relay nội bộ được sử dụng cho chương trình phát hiện hỏng hóc hay hư hại do người dùng gây ra
Relay bước được sử dụng trong ngôn ngữ lập trình SFC
Các loại cảm biến
2.2.1 Khái niệm cảm biến Đây là thiết bị đầu vào của PLC nó có nhiệm vụ lấy tín hiệu phản hồi về PLC
Có nhiều loại cảm biến và công tắc hành trình, trong đó phổ biến nhất là cảm biến quang, cảm biến tiệm cận và cảm biến từ Các cảm biến này được sử dụng để xác định vị trí của xi lanh và phát hiện vật liệu kim loại Việc lựa chọn cảm biến phù hợp phụ thuộc vào mục đích sử dụng và cách lắp đặt.
Cảm biến là thiết bị có khả năng phát hiện sự biến đổi của các đại lượng vật lý và điện, không điện, sau đó chuyển đổi chúng thành các đại lượng điện để có thể đo lường và xử lý.
Cảm biến tiệm cận là thiết bị hoạt động khi có vật thể gần đầu dò, thường được sử dụng trong các mô hình để phát hiện phôi và khay trên băng tải Các loại cảm biến tiệm cận phổ biến bao gồm cảm biến điện cảm, cảm biến điện từ, cảm biến điện dung và cảm biến quang.
Cảm biến từ 20-30V DC, loại NPN Có thiết kế nhỏ gọn được gắng trên xi lanh nhằm xác định hành trình của piston
2.2.4 Cảm biến quang khuếch tán
Cảm biến quang Omron EE-SPY402 là loại cảm biến khuếch tán, được thiết kế với cáp quang kéo dài đến vị trí nhận hàng Với đặc tính khuếch tán, cảm biến này có khoảng cách phát hiện tương đối nhỏ, phù hợp cho các ứng dụng cần độ chính xác cao trong việc nhận diện vật thể.
Công tắc hành trình là thiết bị quan trọng giúp giới hạn hành trình của động cơ nâng hạ và động cơ di chuyển trái phải Bên cạnh đó, nó còn hoạt động như một cảm biến, giúp nhận diện hành trình của động cơ một cách chính xác.
2.2.6 Sơ đồ đấu dây cảm biến với tải
Hình 2.21 Sơ đồ đấu dây cảm biến PNP
Xi lanh khí nén là thiết bị chuyển đổi năng lượng từ khí nén thành động năng để thực hiện các chuyển động Năng lượng này được tạo ra nhờ khả năng nở rộng của khí nén, làm cho piston di chuyển theo hướng mong muốn.
Các loại Xi lanh thường được sử dụng : Xi lanh tác động đơn, Xi lanh tác động kép, Xi lanh xoay, Xi lanh trược
Xi lanh tác động đơn thường được dùng để tác động tịnh tuyến một chiều sau đó dùng lò xo để trở về
Xi lanh kẹp có hai loại là kẹp song song và loại kẹp điểm các loại xi lanh này thường được dùng trong các cơ cấu tay gấp
Van điện từ, hay còn gọi là solenoid valve, là thiết bị cơ điện dùng để kiểm soát dòng chảy của chất khí hoặc lỏng Thiết bị này hoạt động dựa trên nguyên lý đóng mở do lực tác động từ cuộn dây điện từ.
Van điện từ 5/2 không duy trì hoạt động với điện áp 24V, được sử dụng để điều khiển các xi lanh chuyển động Ống khớ nộn có kích thước ỉ4mm được sử dụng trong hệ thống này.
Biến tần
Biến tần là thiết bị chuyển đổi điện áp hoặc dòng điện xoay chiều từ một tần số đầu vào sang một tần số khác ở đầu ra.
Bộ biến tần được sử dụng để điều khiển tốc độ của động cơ xoay chiều bằng cách điều chỉnh tần số Qua đó, tần số của lưới nguồn sẽ được thay đổi thành tần số biến thiên, giúp tối ưu hóa hiệu suất hoạt động của động cơ.
Biến tần chủ yếu bao gồm ba bộ phận chính: Bộ Chỉnh lưu, Mạch một chiều trung gian và Bộ nghịch lưu Ngoài ra, còn có các thành phần bổ sung như Bộ điện kháng xoay chiều, Bộ điện kháng một chiều và Điện trở hãm trong mạch hãm.
2.4.3 Nguyên lý hoạt động Đầu tiên, nguồn điện xoay chiều 1 pha hay 3 pha được chỉnh lưu và lọc thành nguồn 1 chiều bằng phẳng Công đoạn này được thực hiện bởi bộ chỉnh lưu và cầu Đi- ốt và tụ điện Nhờ vậy, hệ số công suất Cosφ của hệ biến tần đều có giá trị không phụ thuốc vào tải và có giá trị ít nhất 0.96 Điện áp một chiều này được biến đổi nghịch lưu thành điện áp xoay chiều 3 pha đối xứng Công đoạn này hiện nay được thực hiện thông qua hệ IGBT ( transistor lưỡng cực có cổng cách ly ) bằng phương pháp điều chế độ rộng xung (PWM) Nhờ tiến bộ của công nghệ vi xử lý và công nghệ bán dẫn hiện nay, tần số chuyển mạch xung có thể lên tới dải tần số siêu âm nhằm giảm tiếng ồn cho động cơ và giảm tổn thất trên lõi sắt động cơ
Hình 2.25 Nguyên lý hoạt động biến tần
Hệ thống điện áp xoay chiều 3 pha có khả năng điều chỉnh biên độ và tần số vô cấp thông qua bộ điều khiển Theo lý thuyết, có mối quan hệ nhất định giữa tần số và điện áp tùy theo chế độ điều khiển Đối với tải có momen không đổi, tỉ số điện áp – tần số giữ nguyên Tuy nhiên, với tải bơm và quậy, mối quan hệ này là hàm bậc 4, trong đó điện áp là hàm bậc 4 của tần số Điều này dẫn đến đặc tính momen là hàm bậc 2 của tốc độ, phù hợp với yêu cầu của tải bơm hoặc quay, vì momen cũng là hàm bậc 2 của điện áp.
Bộ biến tần có hiệu suất chuyển đổi nguồn cao nhờ sử dụng linh kiện bán dẫn công suất hiện đại, giúp năng lượng tiêu thụ gần như tương đương với yêu cầu của hệ thống.
Biến tần hiện đại tích hợp nhiều kiểu điều khiển, phù hợp với đa dạng phụ tải Ngoài ra, chúng còn có bộ PID và tương thích với nhiều chuẩn truyền thông, rất lý tưởng cho việc điều khiển và giám sát trong hệ thống SCADA.
2.4.4 Ứng dụng trong tiết kiệm điện
Hiệu suất chuyển đổi nguồn của bộ biến tần rất cao nhờ vào việc sử dụng linh kiện bán dẫn công suất được sản xuất theo công nghệ hiện đại Điều này dẫn đến việc năng lượng tiêu thụ gần như tương đương với năng lượng yêu cầu của hệ thống.
Theo các tính toán dựa trên dữ liệu thực tế, thời gian thu hồi vốn đầu tư cho một biến tần cho động cơ sơ cấp khoảng 100kW dao động từ 3 đến 6 tháng Hiện nay, việc ứng dụng biến tần trong các xí nghiệp tại Việt Nam đã mang lại những kết quả rõ rệt.
Giải pháp tiết kiệm năng lượng kết hợp với việc cải thiện tính năng điều khiển hệ thống đã khiến các bộ biến tần trở thành ứng dụng tiêu chuẩn cho hệ truyền động của máy bơm và quạt hiện nay.
Nhờ vào công nghệ điều khiển hiện đại và tính năng kỹ thuật cao, các bộ biến tần đang tối ưu hóa năng lượng, mang lại sự hài lòng cho nhiều nhà đầu tư.
+ Nguồn cung cấp: 1/3 pha 220V/380V, 50/60 Hz
+ Dải tần đầu ra: 0.0 - 500 Hz
+ Dễ dàng thay đổi cấp tần số và vector của biến tần
+ Phương pháp điều khiển SLV dùng cho loại có mômen cao, tốc độ chậm
+ Nhỏ gọn dễ dàng lắp đặt
+ Có tích hợp cổng truyền thông RS-485
+ Mạng tương thích Profibus DP, Device Net, CC-link
+ Chức năng giới hạn dòng hữu công, tích hợp chức năng hãm bằng transistor
+ Công nghệ OEC cho phép tiết kiệm năng lượng một cách tối đa
Sơ đồ kết nối 3 pha
- Nếu biến trở được sử dụng thường xuyên, thì ta sử dụng biến trở 1kῺ 2W
- Không kết nối điện trở 0.1k Ὼ và 0.3k Ὼ vào một transistor
- Thiết bị đầu cuối SD và SE thì bị cách ly
- Thiệt bị đầu cuối SD và 5 là thiệt bị đầu cuối thông thường Không nối đất Thiệt bị đầu cuối SD và 5 sẽ không bị cô lập
- Khi thiệt bị đầu cuối PC-SD được sử dụng như một nguồn cung cấp điện 24VDC, cẩn thận không để các thiệt bị đầu cuối ngắn mạch
Hình 2.27 Sơ đồ kết nối Biến Tần FR-E500
- Các nút nhấn và phím cài đặt biến tần
L1,L2,L3 Ngõ vào điện áp AC
U,V,W Đầu ra biến tần đấu với động cơ 3 pha
RH,RM, RL 3 cấp tốc độ tương ứng
SD Tiếp điểm ngõ vào chung
STF Tiếp điểm ngõ vào quay thuận
STR Tiếp điểm ngõ vào quay nghịch
A, B, C Ngõ ra role ( báo động )
Tín hiệu tương tự đầu vào điều khiển biến tần:
10: tín hiệu đầu vào là +5V 2: tín hiệu đầu vào được chọn là: 0 đến 5 VDC hoặc đến 10V
4: tín hiệu đầu vào là 4 đến 20 mA DC
MODE Sử dụng thay đổi chế độ cài đặt
SET Sử dụng để đặt giá trị thiết lập
Bảng 2.20 Nút nhấn của biến tần
Encoder
Encoder là thiết bị dùng để xác định vị trí góc của các bộ phận quay như đĩa quay, trục động cơ hay bánh xe Có hai loại Encoder chính: Encoder tuyệt đối và Encoder tương đối Encoder tuyệt đối cho phép xác định chính xác vị trí của đĩa quay thông qua mã Gray, trong khi Encoder tương đối chỉ có 1, 2 hoặc 3 lỗ và cung cấp tín hiệu mỗi khi đĩa quay hoàn thành một vòng Số lượng lỗ trên đĩa quay của Encoder tương đối ảnh hưởng trực tiếp đến độ chính xác của tín hiệu nhận được, với mỗi lỗ tương ứng với một phần vòng quay.
2.5.2 Nguyên lý hoạt động của Encoder tương đối
Hình 2.28 Nguyên lý hoạt động Encoder
Encoder thường có ba kênh: kênh A, kênh B và kênh I (Index) Trong đó, kênh I được xác định bởi một lỗ nhỏ trên đĩa quay và một cặp cảm biến quang phát-thu Mỗi khi motor quay một vòng, lỗ nhỏ sẽ đi qua vị trí của cảm biến thu phát hồng ngoại, cho phép tia hồng ngoại xuyên qua và tạo ra một tín hiệu Điều này có nghĩa là kênh I sẽ phát sinh một "xung" mỗi khi motor hoàn thành một vòng quay Ngoài ra, đĩa quay còn được chia thành các rãnh nhỏ, với một cặp cảm biến quang khác dành cho các rãnh này, tạo thành kênh A của Encoder.
Encoder hoạt động tương tự như kênh I, nhưng điểm khác biệt là trên kênh A sẽ có N "xung" xuất hiện, phụ thuộc vào số rãnh trên đĩa quay, với N được gọi là độ phân giải của Encoder Mỗi loại Encoder có độ phân giải khác nhau, từ một đến vài hàng rãnh, và độ phân giải này cũng ảnh hưởng đến giá thành của Encoder Việc xác định chính xác độ phân giải của Encoder là rất quan trọng, vì nó ảnh hưởng đến độ chính xác của quá trình điều khiển và phương pháp điều khiển Kênh B của Encoder cũng tương tự như kênh A, với cặp cảm biến quang thu phát được đặt sao cho tín hiệu trên kênh B có cùng tần số với kênh A nhưng lệch pha 90 độ Bằng cách kết hợp tín hiệu từ kênh A và B, chúng ta có thể xác định được chiều quay của động cơ.
Thông số kỹ thuật của Encoder :
- Tần số đáp ứng: 100kHz max
- Tốc độ co phép tối đa: 6000 vòng/phút
- Bảo vệ cấp nguồn ngược cực và ngắn mạch ngõ ra
HỆ THỐNG TỰ ĐỘNG HÓA
Trạm Kho Sắp Xếp Và Lưu Trữ
Hình 3.1 Trạm sắp xếp và lưu trữ
STT Tên thiết bị Thông số kỹ thuật
POWER R62P + NGUỒN CẤP 220VAC R04ENCPU
RX42C4 + 64 Ngõ vào 24VDC RY42NR2P
Công suất:0.75W Ngõ ra: 12.3A Nguồn: 1Pha AC200-240V 50-60Hz Ngõ ra:5A max, 3Pha AC200-240V 0.2-400Hz
3 Bộ nguồn Melsec FX-20PSU
Ngõ vào : 220V Ngõ ra: 24VDC
Tần số hoạt động: 50/60Hz
Tốc độ định mức: 1300/1600 vòng/phút
5 Cảm biến quang omron EE-
Nguồn cấp: 5-24VDC Dòng tiêu thụ: 15-50 Max Ngõ ra: NPN, light on
6 Cảm biến quang DM-1MN
7 Van điện từ AirTAC Loại van 5/2 không duy trì, lưu chất khí Áp suất hoạt động: 1.5-8 bar
Bảng 3.1 Bảng liệt kê thiết bị trạm Sắp xếp và lưu trữ
Cơ cấu nâng hạ gồm
Motor xoay chiều có phanh hãm và hệ thống xích chuyền động Cơ cấu nâng hạ đem piston lấy hàng đến các khây ở kho hàng
3.1.2 Cơ cấu Piston lấy hàng
Piston lấy hàng được điều khiển từ valve một chiều
Khi cấp điện thì piston đẩy ra, khi ngắt điện piston thu vào
Trên piston lấy hàng có 2 cảm biến điện từ cảm biến vị trí của piston
2 thanh nhôm làm giá đỡ, đây là vị trí piston lấy hàng
Trên Khây lấy hàng có gấn cảm biến xác định có hàng
3.1.4 Cảm biến vị trí có hàng
Tại vị trí khây hàng được đặt 3 cảm biến quang khuyến tán thu phát chung của
Omrom 3 cảm biến này ngoài nhiệm vụ xác định có hàng trên khây còn xác định hàng có được đặt đúng vị trí hay không
Hình 3.5 Cảm biến vị trí có hàng
3.1.5 Cảm biến vị trí dưới
Cảm biến hành trình dưới được lắp đặt dưới cơ cấu nâng hạ, và khi cơ cấu này di chuyển đến vị trí dưới, cảm biến sẽ kích hoạt ở mức ON.
Hình 3.6 Cảm biến vị trí dưới
3.1.6 Cảm biến vị trí bên phải
Cơ cấu gồm một cảm biến vị trí đầu bên phải
( vị trí lấy hàng ) và một công tắt hành trình bên phải
Hình 3.7 Cảm biến vị trí bên phải
Cảm biến vị trí bên phải sẽ kích hoạt ở chế độ ON khi cơ cấu di chuyển đến vị trí lấy hàng Công tắc hành trình bên phải được kết nối giữa chân SD và chấn STF của biến tần, giúp ngăn chặn lỗi do người lập trình Nếu động cơ không dừng lại ở vị trí ban đầu bên phải, công tắc sẽ tự động dừng động cơ để đảm bảo an toàn cho hệ thống.
3.1.7 Cảm biến vị trí hàng
Cảm biến hàng là cảm biến từ được lắp đặt trên cơ cấu nâng hạ, với các thanh nhôm được bố trí đúng vị trí hàng Khi cơ cấu nâng hạ di chuyển đến vị trí hàng, cảm biến sẽ kích hoạt ở mức ON.
Hình 3.8 Cảm biến vị trí hàng
3.1.8 Cảm biến vị trí cột
Cảm biến cột là thiết bị sử dụng cảm biến từ để gắn lên cơ cấu di chuyển trái phải Nó được đặt tại các vị trí cột cần để hàng nhằm lấp các thanh nhôm Khi cơ cấu di chuyển đến đúng vị trí, cảm biến cột sẽ tác động để đảm bảo quá trình hoạt động diễn ra chính xác.
Hình 3.9 Cảm biến vị trí cột
The I/O position in the station is determined by its connection to the module and the module's connection to the main basic unit Below is the connection layout for the I/O into the module To identify the connection position with the main basic unit, refer to the parameters in the GX Works3 configuration.
X02 Công tắt hành trình dưới ( vị trí ban đầu)
X03 Công tắt hành trình trái (vị trí ban đầu)
3.1.10 Sơ đồ đấu dây toàn hệ thống
Trạm Vận Chuyển
Bảng các thiết bị của trạm
STT Tên thiết bị Thông số kỹ thuật
PLC Mitsubishi IQ-R 40 ngõ vào và 40 ngõ ra
POWER R62P:+ NGUỒN CẤP 220VAC R04ENCPU
RX42C4: + 64 Ngõ vào 24VDC RY42NR2P:+ 64 Ngõ ra 24VDC RD62P2
Biến tần FR-E520S-0.75W Công suất:0.75W
Ngõ ra: 12.3A Nguồn : 1Pha AC200-240V 50-60Hz Ngõ ra:5A max, 3Pha AC200-240V 0.2- 400Hz
3 Bộ nguồn Melsec FX-20PSU Ngõ vào : 220V
Tần số hoạt động: 50/60Hz
Tốc độ định mức: 1300/1600 vòng/phút
Cảm biến quang omron EE
Nguồn cấp: 5-24VDC Dòng tiêu thụ: 15-50Max Ngõ ra: NPN, light on
6 Cảm biến quang DM-1MN
7 Van điện từ AirTAC Loại van 5/2 không duy trì, lưu chất khí Áp suất hoạt động: 1.5-8 bar
8 Encoder Omron E6B2-CWZ6C 5-24VDC,360 xung, 1 pha
Bảng 3.3 Bảng liệt kê thiết bị trạm vận chuyển
Hình 3.11 Cơ cấu băng tải
Hệ thống băng tải được điều khiển bởi 4 động cơ thông qua một biến tần, cho phép băng tải hoạt động liên tục để vận chuyển khay hàng qua các trạm Băng tải sẽ dừng lại khi nhận tín hiệu từ các trạm hoặc theo lập trình đã định sẵn Thiết kế của hệ thống băng tải cũng cho phép lập trình độc lập với các trạm khác hoặc tích hợp với các trạm điều khiển khác một cách linh hoạt.
Cơ cấu pitton bao gồm hai thành phần chính: một là cơ cấu pitton nâng băng tải, có chức năng điều khiển hướng di chuyển của các khây hàng; hai là cơ cấu pitton dùng để đẩy viên hàng từ trạm vận chuyển này sang trạm kế tiếp.
Hình 3.12 Cơ cấu piston nâng hạ băng tải
Cảm biến từ Piston có thiết kế nhỏ gọn, chuyên dùng để xác định hành trình của piston Nhờ vào thanh nam châm di chuyển bên trong piston, cảm biến này hoạt động chính xác, giúp theo dõi hiệu quả quá trình vận hành.
Hình 3.13 Cảm biến từ piton
Cảm biến tiệm cận là thiết bị cảm biến hoạt động khi có vật thể gần đầu dò Chúng thường được sử dụng trong các mô hình để phát hiện phôi và khay trên băng tải Cảm biến này có thể thuộc loại NPN, PNP hoặc cả hai.
- Cảm biến báo có phôi trong khay: Phát hiện một phôi đã có trong cơ cấu khay chứa phôi trên băng tải
Hình 3.15 Cảm biến có phôi
3.2.4 Sơ đồ đấu dây toàn hệ thống trạm Vận Chuyển
Trạm Gắp Phôi Và Gia Công
Hình 3.16 Trạm gắp phôi và gia công
Bảng liệt kê thiết bị trong trạm
STT Tên thiết bị Thông số kỹ thuật
POWER R62P: NGUỒN CẤP 220VAC R04ENCPU
RX42C4: 64 Ngõ vào 24VDC RY42NR2P:64 Ngõ ra 24VDC RD62P2
Công suất:0.75W Ngõ ra: 12.3A Nguồn: 1Pha AC200-240V 50-60Hz Ngõ ra:5A max, 3Pha AC200-240V 0.2-400Hz
3 Bộ nguồn Melsec FX-20PSU
Ngõ vào : 220V Ngõ ra: 24VDC
4 Động cơ REVERSIBLE2RK6GN
Tần số hoạt động: 50/60Hz
Tốc độ định mức: 1300/1600 vòng/phút
5 Cảm biến quang omron EE-
Nguồn cấp: 5-24VDC Dòng tiêu thụ: 15-50 Max Ngõ ra: NPN, light on
6 Van điện từ AirTAC Loại van 5/2 không duy trì, lưu chất khí Áp suất hoạt động: 1.5-8 bar
Bảng 3.4 Bảng liệt kê thiết bị trong trạm gắp và gia công phôi
3.3.1 Cơ Cấu Tay Gấp Chuyển Động
Tay gắp là thiết bị quan trọng dùng để lấy hàng từ băng tải và chuyển đến vị trí gia công phôi, sau đó đưa qua trạm tiếp theo Cơ cấu này được vận hành bởi một motor AC 3 pha, giúp quay trục ren để di chuyển hàng hóa từ vị trí lấy đến các vị trí gia công chi tiết sản phẩm.
Hình 3.17 Cơ cấu tay gắp
3.3.2 Cơ Cấu Tay Gấp Quay
Cơ cấu tay gắp quay dùng để điều chỉnh chiều của phôi sao cho phù hợp với thùng hàng và vị trí gia công phôi
Hình 3.18 Cơ cấu tay gắp quay
Băng tải, sử dụng động cơ 1 pha, được thiết kế để vận chuyển phôi Tùy thuộc vào yêu cầu và cách lập trình, băng tải có thể hoạt động liên tục hoặc dừng lại trong quá trình làm việc.
Hình 3.19 Cơ cấu băng tải
3.3.4 Van Khí Nén Và Ống Khí
Van khí nén 5/2 không duy trì với điện áp 220V và 24V được sử dụng để điều khiển cánh tay robot trong quá trình gia công hàng Các van có thể kết nối với nhau thành cụm nhờ đế van và được cấp khí từ một nguồn duy nhất Ống khớp nộn được sử dụng có kích thước ỉ4mm, ỉ6mm và ỉ8mm, đảm bảo hiệu quả trong hệ thống điều khiển.
Hình 3.20 Van và ống khí nén
Cảm biến từ Piston là thiết bị dùng để xác định hành trình của piston, hoạt động dựa trên thiết kế có thanh nam châm di chuyển bên trong piston, giúp cảm biến này hoạt động với độ chính xác cao.
Hình 3.21 Cảm biến từ Piston
Cảm biến từ có vai trò quan trọng trong việc xác định vị trí của tay gắp, bao gồm vị trí gắp hàng, vị trí gia công và vị trí trạm kế tiếp.
Hình 3.22 : Cảm biến xác định vị trí tay gắp
Cảm biến quang omron EE-
SPY412 loại khuếch tán, có cáp quang kéo dài đến vị trí nhận hàng Vì là cảm biến quang khuếch tán nên có khoảng cách cảm biến nhỏ
Hình 3.23 Cảm biến quang khuếch tán
The I/O position in the station is determined by its connection to the module and the module's connection to the main basic unit Below is the connection layout of the I/O to the module To identify the connection position to the main basic unit, refer to the parameters in the GX Works3 configuration.
X25 Cảm biến cuối bằn tải
X26 Cảm biến tay gắp ở dưới
X27 Cảm biến tay gắp ở trên
X28,X29,X2A Cảm biến vị trí tay gắp
X2B Cảm biến hành trình Piston vào
X2C Cảm biến hành trình Piston ra
X2D Cảm biến hành trình Piston giữa
Y62 Tốc độ RH (cao) biến tần
Y63 Tốc độ RM (trung bình) biến tần
Y64 Tốc độ RL (thấp) biến tần
Bảng 3.5 Bảng I/O trạm Gắp phôi và gia công
3.3.7 Sơ đồ đấu dây toàn hệ thống trạm Gắp phôi
Trạm Cấp Phôi
Bảng liệt kê thiết bị trong trạm
STT Tên thiết bị Thông số kỹ thuật
PLC Mitsubishi IQ-R POWER R62P: NGUỒN CẤP 220VAC
R04ENCPU RX42C4: 64 Ngõ vào 24VDC RY42NR2P:64 Ngõ ra 24VDC RD62P2
Biến tần FR-E520S-0.75W Công suất:0.75W
Ngõ ra: 12.3A Nguồn: 1Pha AC200-240V 50-60Hz Ngõ ra:5A max, 3Pha AC200-240V 0.2- 400Hz
3 Bộ nguồn Melsec FX-20PSU
Ngõ vào : 220V Ngõ ra: 24VDC
Tốc độ định mức: 1300/1600 vòng/phút
Cảm biến quang omron EE-
Nguồn cấp: 5-24VDC Dòng tiêu thụ: 15-50 Max Ngõ ra: NPN, light on
6 Van điện từ AirTAC Loại van 5/2 không duy trì, lưu chất khí Áp suất hoạt động: 1.5-8 bar
Encoder Omron E6B2-CWZ6C 5-24VDC,360 xung, 1 pha
Bảng 3.6 Bảng liệt kê thiết bị trạm Cấp phôi
Công tắc hành trình được sử dụng để giới hạn hành trình của cánh tay quay, đồng thời hoạt động như một cảm biến để nhận biết vị trí lấy hàng và vị trí nhận hàng.
Hình 3.25 Công tắc hành trình
3.4.2 Cơ Cấu Cấp Phôi Ổ chứa phôi có chức năng chứa phôi để cung cấp phôi cho toàn bộ hệ thống Nếu ổ chứa phôi hết phôi thì trạm sẽ ngừng hoạt động, tùy thuộc vào cách thức của người lập trình mà ta có quy trình công nghệ hoạt động khác nhau của trạm
Hình 3.26 Cơ cấu cấp phôi
Cơ cấu này có nhiệm vụ di chuyển phôi từ ổ chứa đến vị trí đặt phôi để dễ dàng lấy ra Piston một chiều hoạt động khi có điện cấp vào valve, khiến piston đẩy ra; khi ngắt điện, piston sẽ trở về vị trí ban đầu.
Hình 3.27 Cơ cấu piston đẩy
Cơ cấu vận chuyển phôi đóng vai trò quan trọng trong việc di chuyển phôi từ nơi cấp đến trạm gia công tiếp theo Nó được trang bị các thành phần như cơ cấu hút và cảm biến hành trình, giúp xác định chính xác vị trí của bàn xoay Các công tắc hành trình và cảm biến có thể được điều chỉnh linh hoạt để đáp ứng yêu cầu cụ thể của hệ thống.
Hình 3.28 Cơ cấu bàn xoay
Cơ cấu này là một nam châm điện, hoạt động với nguồn điện 24V, có chức năng hút và giữ phôi trong suốt quá trình di chuyển đến trạm tiếp theo Khi cần thả phôi, chỉ cần ngắt nguồn điện để nam châm điện không còn hoạt động.
Hình 3.29 Cơ cấu van hút
The I/O position in the station is determined by its connection to the Module and the Module's connection to the main basic unit Below is the connection layout for the I/O to the module To identify the connection position with the main basic unit, refer to the parameters in the GX Works3 configuration.
Bảng 3.7 Vị Trí I/O trong trạm Cấp phôi
3.4.7 Sơ đồ đấu dây toàn hệ thống trạm Cấp phôi