bai giang li thuyet dieu khien tu dong chuong 2

Bài giảng lý thuyết điều khiển tự động chương 2 7 ts nguyễn thu hà
... điều khiển mới: Lý thuyết điều khiển thông minh 20 / 02/ 2 021 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động Các phương pháp điều khiển thông minh 20 / 02/ 2 021 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động ... C(s) = kp − PID: kp = 0.00 02, ki = 9 .23 78, kd = 17.05 72 − Hàm mục tiêu: J = 0.0047 − Hàm độ hệ kín: = s+ s + 3s2 + 2s+1 Chọn tham số tối ưu cho điều khiển PID (tiếp) Ví dụ 2: Ứng dụng GA chọn tham ... PI (tiếp) runPI_GA.m clc; [x fval] = ga(@PI_GA ,2, -diag([1 1]),zeros (2, 1)); kp=x(1);ki=x (2) ; b0=1; b1=5; a0=1; a1=3; a2=5; S = tf([b0 b1],[a0 a1 a2]); C = tf([kp ki],[1 0]); G = feedback(S*C,1);
Ngày tải lên: 23/03/2023, 22:10

Bài giảng lý thuyết điều khiển tự động chương 2 2 ts nguyễn thu hà
... h x2 (x1 x Ah w1 Ah w2 x) w (x2 f2 x1 w2 (w Ah x1 x) w w2 Ah x1 f2 x2 x2 * w 2) x w x2 w x1 w x2) Biến đổi Laplace cho hai vế: A hs X (s) w X (s) (x1 10 x) W 1(s) (x2 x) W 2( s) w X 1(s) w X 2( s) ... w) W 2( s) W (s)) A H (s) w2 kwh s W (s) W 1(s) W 2( s) w 2) x Khai triển chuỗi Taylor cho phương trình thứ hai: x (x x) f2 h h x f2 x (w 1x1 Ah x1 x Ah w1 (w x Ah f2 w1 x w 2x2 f2 w1 w1 (w w 2) x) ... trước: A 0.8m 2, w2 20 0kg/phút x 0.4,x1 h 1m ét 1 .25 kg/lít 0.8, x2 0 .2 Từ phương trình mơ hình trạng thái xác lập: w1 w 1x1 Ta xác định giá trị lại điểm làm việc: w1 w w2 w w 2x2 (w w 2) x 100 [kg/phút]
Ngày tải lên: 23/03/2023, 22:10

Bài giảng lý thuyết điều khiển tự động chương 2 3 ts nguyễn thu hà
... Biên độ : L(𝜔) = 20 𝑙𝑔 𝑘𝑇 − 1+𝑇 ? ?2 + Re Im - kT - 1/T - kT /2 -k/2T ∞ 0 𝑘 − (1+? ?2? ?? ?2) =20 lgk - 20 lg - 20 lg 𝑇𝜔 + Khi 1/T L() = 20 lgk -20 lgT-40lg Pha: () = 1() + ? ?2( ) =- /2 - arctan(T) ... 20 lg ? ?2 1+𝑇 ? ?2 2 𝑘 1+𝑇 ? ?2 Magnitude (dB) ෨ Biên độ: L() = 20 lg 𝐺(𝑗𝜔) = 20 lg -45 -90 -3 10 -2 -1 10 10 10 Frequency (rad/sec) Ví dụ: 11/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 2. Khâu ... 1+𝑇 2? ?? ?2 - j1+𝑇 2? ?? ?2 • Đồ thị bode: Khi 1/T L() = 20 lgk -20 lgT Pha: () = -arctan(T) Khi =0 () = =1/T () = -/4 =∞ () = - /2 + 𝑘𝑇𝜔 1+𝑇 ? ?2 Bode Diagram 20 10 -10 -20 Phase (deg) = 20 lg
Ngày tải lên: 23/03/2023, 22:15

Bài giảng lý thuyết điều khiển tự động chương 2 1 ts nguyễn thu hà
... động 26 Ví dụ • B1: Hệ có tuyến thẳng Pk = G1G2G3 • B2: Hệ có vịng lặp dính đơi L1= G1G2H1 L2=G2G3H2 L3=-G1G2G3 • B3:∆ = − 𝐿1 + ? ?2 + 𝐿3 = 1-G1G2H1-G2G3H2+G1G2G3 • B4: Do tất vịng lặp dính vào tuyến ... H2 u 1 G1 G2 G3 y H1 -1 11/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 28 Ví dụ • B1: Hệ có tuyến thẳng P1 = G1G2G3 • B2: Hệ có vịng lặp L1= G1H1 L2=G3H2 L3=-G1G2G3 • B3:∆ = − 𝐿1 + ? ?2 ... G1G2G3 𝐺 𝑠 = 1= ∆ 1−G1G2H1−G2G3H2+G1G2G3 11/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 27 Ví dụ • Ví dụ 2: Sử dụng cơng thức Mason để xác định hàm truyền đạt cho hệ: H2 u G1 G3 G2 y
Ngày tải lên: 23/03/2023, 22:20

Bài giảng lý thuyết điều khiển tự động chương 2 6 ts nguyễn thu hà
... ta có với a = 4: TI = T1+4T2 = 23 TD = kp = 4𝑇1? ?2 T1+4T2 TI 8𝑘? ?22 = = 3? ?20 23 23 8? ?2? ? ?25 = 2, 6 = 0,0575 Vậy : kp =0,0575 ;TI = 23 ; TD = 2, 6 cho điều khiển PID 05/05 /20 20 Nguyễn Thu Hà _ Lý thuyết ... 1 ,2 • Khi a = 9; kp =0,56 ;TI = 2, 7 05/05 /20 20 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 30 Ví dụ 05/05 /20 20 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 31 Phương pháp tối ưu đối xứng 2) ... ln 20 kT5% Đối tượng khâu quán tính bậc hai 𝑆 𝑠 = Bộ điều khiển 05/05 /20 20 𝑘 + 𝑇1 𝑠 + ? ?2 𝑠 k p (1 + TA s )(1 + TB s ) R( s) = k p 1 + + TD s = TI s TI s TT TI = T +T2 ;TD = T +T2 Nguyễn
Ngày tải lên: 23/03/2023, 22:21

Bài giảng lý thuyết điều khiển tự động chương 1 nguyễn thành phúc
... động Chương 2: Mơ tả tốn học hệ thống điều khiển li? ?n tục Chương 3: Đánh giá tính ổn định hệ thống Chương 4: Chất lượng hệ thống điều khiển Chương 5: Thiết kế hệ thống điều khiển li? ?n tục •Chương ... •Chương 7: Phân tích thiết kế hệ thống điều khiển rời rạc •Chương 8: Hệ thống điều khiển phi tuyến Tài li? ??u tham khảo Giáo trình: Lý thuyết điều khiển tự động Nguyễn Thị Phương Hà- Huỳnh Thái Hồng- ... hệ thống “gần” với mục đích định trước Khái niệm Thí dụ 2: Hệ thống bơm nước tự động k 1. Phao cảm nhận mực nước: thu thập thơng tin 2. Tác động đĩng tiếp điểm: xử lý thơng tin 3. Máy bơm hoạt
Ngày tải lên: 27/09/2015, 11:48

Bài giảng lý thuyết điều khiển tự động chương 5 nguyễn thành phúc
... sau hiệu chỉnh: => (1) 72 Phương pháp giải tích thiết kế điều khiển PID •Phương trình đặc trưng mong muốn có dạng: => => (2) •Cân hệ số hai phương trình (1) (2) , suy ra: => Kết luận 73 ... đặc BK trưng ] = hệ thống kín (1) •Bước 2: Viết phương trình đặc trưng mong muốn (2) cực mong muốn •Bước 3: Cân hệ số hai phương trình đặc trưng (1) (2) tìm vector hồi tiếp trạng thái K. 77 ... sai của hệ thống 19 So sánh các khâu hiệu chỉnh PD PI PID 20 Thiết kế hệ thống điều khiển li? ?n tục dùng phương pháp quỹ đạo nghiệm số 21 Trình tự thiết kế khâu hiệu chỉnh sớm pha dùng QĐNS
Ngày tải lên: 27/09/2015, 11:51

Bài giảng lý thuyết điều khiển tự động chương 6 nguyễn thành phúc
... 2c(k + 3) + c(k + 2) + 5c(k + 1) + 4c(k ) = r (k + 2) + 3r (k ) •Đặt biến trạng thái theo phương pháp tọa độ pha, ta phương trình trạng thái: đó: 42 Thành lập PTTT hệ rời rạc từ PTTT hệ li? ?n ... PTTT hệ li? ?n tục •Bước 2: Tính ma trận q độ 47 Thí dụ thành lập PTTT hệ rời rạc từ PTTT hệ li? ?n tục •Bước 3: Rời rạc hóa PTTT hệ li? ?n tục 48 Thí dụ thành lập PTTT hệ rời rạc từ PTTT hệ li? ?n ... •Bước 1: Thành lập PTTT mơ tả hệ li? ?n tục (hở): •Bước 2: Tính ma trận q độ với 43 Thành lập PTTT hệ rời rạc từ PTTT hệ li? ?n tục •Bước 3: Rời rạc hóa PTTT mơ tả hệ li? ?n tục (hở): với •Bước 4:
Ngày tải lên: 27/09/2015, 11:51

Bài giảng lý thuyết điều khiển tự động chương 7 nguyễn thành phúc
... 0. 320 )( z − 0.375 + j 0. 320 ) = => z − 0.75z + 0 .24 3 = 78 PP phân bố cực Thí dụ •Cân hệ số phương trình đặc trưng hệ thống phương trình đặc trưng mong muốn, ta được: => •Kết luận: K = [3. 12 1.047] ... tả hệ hở: B1: PTTT mô tả hệ li? ?n tục: 81 PP phân bố cực Thí dụ B2: Ma trận độ: => => 82 PP phân bố cực Thí dụ B3: PTTT mô tả hệ rời rạc hở: 83 PP phân bố cực Thí dụ 2 Tính độ lợi hồi tiếp trạng ... A + B K ] = •Bước 2: Viết phương trình đặc trưng mong muốn d d n ∏ ( z − pi ) = (1) (2) i =1 p , (i = 1, n) cực mong muốn i •Bước 3: Cân hệ số hai phương trình đặc trưng (1) (2) tìm vector hồi
Ngày tải lên: 27/09/2015, 11:53

Bài giảng lý thuyết điều khiển tự động chương 3 3 ts nguyễn thu hà
... khiển 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động Nội dung • Bộ điều khiển phản hồi trạng thái gán điểm cực • Bộ quan sát trạng thái • Bộ điều khiển phản hồi đầu 19/ 02/ 2 020 Nguyễn ... )) = ( s − s1 )( s − s2 ) ( s − sn ) (2) Cách làm: Khai triển hai vế phương trình (2) thành đa thức bậc n Cân hệ số đa thức Giải hệ n phương trình thu tìm r1, ., rn 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý ... + r2 − ) + r1 + = s + ( r3 − 3) s + ( r2 − ) s + r1 + r +1 r − s − + r 3 1 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động (1) • Với điểm cực mong muốn ta có: ( s − s1 )( s − s2 )(
Ngày tải lên: 27/02/2023, 19:30

Bài giảng lý thuyết điều khiển tự động chương 3 2 ts nguyễn thu hà
... Lyapunov, tức quỹ đạo trạng thái tự có hướng tiến gốc tọa độ kết thúc 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 3 .2. 2 Phân tích tính điều khiển + Tại lại cần phải hiểu biết tính điều khiển ... điều khiển điểm trạng thái x0 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động + Khái niệm điều khiển hoàn toàn Định nghĩa 3.7: Một hệ thống tuyến tính, li? ?n tục gọi điều khiển tồn tín ... vào u(t), y(t) khoảng thời gian [t 0,T] 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 12 +Các tiêu chuẩn xét tính quan sát Định lý 3. 12: Cho hệ tham số khơng có trạng thái thừa Các
Ngày tải lên: 23/03/2023, 22:10

Bài giảng lý thuyết điều khiển tự động chương 3 1 ts nguyễn thu hà
... sâu đặc tính hệ 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động Ví dụ • Ví dụ 1: Động chiều: 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động Ví dụ 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý ... { 19/ 02/ 2 020 e 2t ( s − 2) ( s − 3) }= s −3 −1 { s −3 } s − 2? ?? ( s − 2) ( s − 3) e3t − e 2t 3t e Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 28 3) Tìm quỹ ... Xét k=0 k=1 CB = CAB = −1 1 = ? ?2? ?? ? ?2 1 0 1 −1 =80 3 Do r = k+1 = 19/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 24 3.1.3 Quỹ đạo trạng thái 1) Khái niệm
Ngày tải lên: 23/03/2023, 22:19

Bài giảng lý thuyết điều khiển tự động chương 1 ts nguyễn thu hà
... khiển 11/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 24 11/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động 25 3.1 Theo cấu trúc HT điều khiển vịng hở HT điều khiển vịng kín 3 .2 Theo ... ( x2 ) = y2 Nguyên lý xếp chồng f ( x1 + x2 ) = f ( x1 ) + f ( x2 ) = y1 + y2 HT điều khiển tuyến tính • áp dụng ngun lý xếp chồng • mơ tả phương trình vi phân tuyến tính HT điều khiển phi tuyến ... tài li? ??u chuẩn bị trước tờ A4) 50% • 11/ 02/ 2 020 Nguyễn Thu Hà _ Lý thuyết điều khiển tự động Tài li? ??u tham khảo Nguyễn Doãn Phước Cơ sở lý thuyết điều khiển tuyến tính Nhà xuất Bách khoa, 20 16
Ngày tải lên: 23/03/2023, 22:21

Bài giảng lý thuyết điều khiển tự động chương 3 nguyễn thành phúc
... 12 Tiêu chuẩn ổn định tần số Thí dụ (tt) Độ dốc đoạn CD: 26 54 − = +40 (dB/dec) 2? ?? 1.301ωg1 = + = 0.7 lg •Các tần số gãy: 40 − 26 20 lg ωg = lg ωg = 1.301 ωg1 = 10 = (rad/sec) ωg = 10 = 20 ... truyền cần tìm có dạng: G(s) = K (T1s + 1)(T2 s + 1) s(T3s + 1) 20 lg K = 40 K = 100 1 1 1 = = 0 .2 = = = 0.01 T1 = T2 = = 0.05 T3 = ωg1 ωg 20 ωg 100 2 83 Tiêu chuẩn ổn định tần số Tiêu chuẩn ... •Tiêu chuẩn Nyquist: Hệ thống kín Gk(s) ổn định đường cong Nyquist hệ hở G(s) bao điểm (−1, j0) l /2 vòng theo chiều dương (ngược chiều kim đồng hồ) ω thay đổi từ đến +∞, l số cực nằm bên phải mặt
Ngày tải lên: 27/09/2015, 11:49
Bài giảng lý thuyết điều khiển tự động chương 4 nguyễn thành phúc
... bậc với cặp cực định 27 [...]... ứng quá độ Hệ dao động bậc 2 •Hàm truyền hệ dao động bậc 2: •Hệ dao động bậc 2 có cặp cực phức: 19 Đáp ứng quá độ Hệ dao động bậc 2 (tt) Giản đồ cực –zero ... Giản đồ cực –zero của khâu dao động bậc 2 Đáp ứng quá độ của khâu dao động bậc 2 20 Đáp ứng quá độ Nhận xét về hệ dao động bậc 2 Hệ dao động bậc 2 có cặp cực phức, đáp ứng quá độ cóù dạng ... suy... của khâu dao động bậc 2 Đáp ứng quá độ của khâu dao động bậc 2 24 Đáp ứng quá độ Quan hệ giữa vị trí cực và đáp ứng hệ dao động bậc 2 •Các hệ dao động bậc 2 có các cực nằm cách gốc
Ngày tải lên: 27/09/2015, 11:49

Bài giảng Lý thiết điều khiển tự động: Chương 2 - Mô tả toán học hệ thống điều khiển liên tục - Trường Đại Học Quốc Tế Hồng Bàng
... biểu thức định nghĩa (2. 1) hội tụ (6) Tính tuyến tính 2. 2 HÀM TRUYỀN ĐẠT VÀ ĐẠI SỐ SƠ ĐỒ KHỐI 2. 2.1 Phép biến đổi Laplace a1 f1(t) a2 f2(t) a1 F1(s) a 2 F2(s) (2. 2) L b Tính chất ... TỰ ĐỘNG GVTH: Võ Văn Định (2) CHƯƠNG 2: MƠ TẢ TỐN HỌC HỆ THỐNG ĐIỀU KHIỂN LI? ?N TỤC 2. 1 Khái niệm 2. 2 Hàm truyền đạt đại số sơ đồ khối 2. 3 Sơ đồ dịng tín hiệu 2. 4 Phương pháp khơng gian trạng ... j s j dt e j e e t u t st t j t j L 2 2 (2. 18) s f(t) L Từ công thức Euler ta có: (18 )2. 2 HÀM TRUYỀN ĐẠT VÀ ĐẠI SỐ SƠ ĐỒ KHỐI 2. 2 .2 Hàm truyền đạt a Định nghĩa: 1 ( ) (
Ngày tải lên: 01/04/2021, 01:30

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... CRRT )( 21 + = Mạch trể pha: C R 1 R 2 1 1 )( + + = Ts Ts KsG C α 1 21 2 < + = RR R α Mạch sớm pha: C R 1 R 2 1 1 )( + + = Ts Ts KsG C α 21 2 RR R K C + = 21 12 RR CRR T + = 1 2 21 > ... )().(sin)( nếu nếut tuttf ω ω f(t) t 0 {} 22 )()(sin ω ω ω + = s tutL 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 16 Xét hệ thống mô tả bởi phương trình vi phân: Biến đổi Laplace 2 vế phương trình ... 0 0 t )()( nếu nếut ttutr r(t) t 0 1 1 {} 2 1 )(. s tut =L < ≥ == − − 0 0 0 )(.)( t nếu t nếu at at e tuetf f(t) t 0 1 { } as tue at + = − 1 )(.L 26 September 20 06 © H. T. Hồng - ÐHBK
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
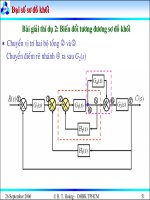
... 2: Biến đổi tương đương sơ đồ khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối Tính toán cụ thể: 2 1 * G H G A = 22 2 1 * HG G G B + = 2 12 2 1 11 * G HG G H GG AC + =+=+= 22 13 32 ... thí dụ 2: Biến đổi tương đương sơ đồ khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối 3 22 13 32 22 13 32 3 1 1 1 1 * H HG HGGG HG HGGG HG G G D D E + + + + + = + = 3133 322 2 13 32 1 HHGHGGHG ... đổi tương đương sơ đồ khối 3133 322 2 13 32 1 3133 322 2 13 32 1 1 1 1 .1 1 . 1 * HHGHGGHG HGGG G HHGHGGHG HGGG G GG GG G E E td +++ + + +++ + = + = 131 321 3133 322 2 131 321 1 HGGGGGHHGHGGHG HGGGGG G
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... hiệu: 21 4 321 )(1 LLLLLL + + + + −=∆ Các đònh thức con: 1 1 =∆ 1 2 =∆ 13 1 L−=∆ Hàm truyền tương đương của hệ thống: )( 1 3 322 11 ∆+∆+∆ ∆ = PPPG td 27 21 425 4 322 54 627 214 14 721 546154 321 1 )1( ... Giải: Đường tiến: Vòng kín: 54 321 1 GGGGGP = 546 12 GGGGP = 721 3 GGGP = 141 HGL − = 27 22 HGGL − = 25 463 HGGGL − = 25 4 324 HGGGGL − = 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 65 Sơ đồ ... September 20 06 © H. T. Hồng - ÐHBK TPHCM 67 Sơ đồ dòng tín hiệu Sơ đồ dòng tín hiệu Thí dụ 2 (tt) Thí dụ 2 (tt) Đường tiến: Vòng kín: 321 1 GGGP = 31 12 GHGP = 22 1 HGL − = 3 322 HGGL − = 321 3 GGGL
Ngày tải lên: 07/08/2014, 23:24
Bạn có muốn tìm thêm với từ khóa: