McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 3 pptx

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 3 pptx
... VR motor step angles are 15 and 30 º per step. The 30 º angle is obtained with a 4-tooth rotor and a 6-pole stator, and the 15º angle is achieved with an 8-tooth rotor and a 12-pole stator. These motors ... bellows and helixes, as shown in Figure 1-1 6. The bellows con- figuration (a) is acceptable for light-duty applications where misalign- Figure 1-1 5 Flexible shaft cou- pl...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 1 pot
... 230 Efficiency 231 The Environment 232 Thermal 232 Ground Cover 233 Topography 233 Obstacles 234 Complexity 235 Speed and Cost 235 The Mobility Index Comparison Method 236 The Practical Method 236 Explain ... process, and Contents vii Flat Belts 73 O-Ring Belts 73 V-Belts 73 Timing Belts 75 Smoother Drive Without Gears 76 Plastic -and- Cable Chain 77 Chain 79 Ladder Chain 80...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 2 docx
... reduce friction and gain higher efficiency than con- ventional leadscrews. Figure 1-1 2 Worm-drive systems can provide high speed and high torque. Figure 1-1 3 Ballscrew-driven single-axis slide mechanism ... the 3D model is complete. It is then removed and finished. 10 Chapter 1 Motor and Motion Control Systems loops. X-Y tables and milling machines position their loads by mu...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 4 doc
... or forward. The bidirec- tional digital linear actuator shown in Figure 1 -3 3 can provide linear res- Figure 1 -3 3 This light-duty lin- ear actuator based on a perma- nent-magnet stepping motor ... positioning antenna reflectors, opening and closing security gates, handling materials, and raising and lowering scis- sors-type lift tables, machine hoods, and light-duty jib crane...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 5 doc
... mech- anism. Power transfer mechanisms are normally divided into five gen- eral categories: 1. belts (flat, round, V-belts, timing) 2. chain (roller, ladder, timing) 3. plastic -and- cable chain (bead, ... belts, plastic -and- cable chain, and all types of steel chain connect the input to the output mechanically by means of teeth just 71 76 Chapter 2 Indirect Power Transfer Devices Tab...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 6 ppsx
... is both com- pact and simple. 112 Chapter 3 Direct Power Transfer Devices Figure 3- 9 Figure 3- 1 0 Figure 3- 1 1 Figure 3- 1 2 Figure 3- 1 3 102 Chapter 2 Indirect Power Transfer Devices HIGH-SPEED GEARHEADS ... assem- bles to complex spring and synthetic rubber assembles. Those including chain belts, splines, bands, and rollers are shown here. Figure 3- 1 Figure 3- 2...
Ngày tải lên: 10/08/2014, 04:22
McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 7 pot
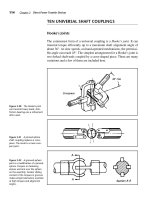
... couplings are ideal for toys, instruments, and other light-duty mechanisms. For heavy duty, such as the front-wheel drives of Figure 3- 2 3 A pinned-sleeve shaft-coupling is fastened to one saft that ... stop- ping the rotating part, usually the output shaft. Figures 3- 4 4 through 3- 5 3 show several torque limiters, which are good examples of the wide vari- ety of methods availab...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 9 ppt
... drive -and- brake steering sys- tem. Controlling the speed of each track directly adds a second major drive source, but gives fine steering and speed control. A second improvement to drive -and- brake ... These trucks (Figure 5-1 4) were called half-tracks. For a mobile robot, this is a less satisfactory layout since it Figure 5-1 3 Basic two-track layout Figure 5-1 4 The half-tra...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 10 ppt
... there. Figures 7-8 and 7-9 show four- and six-legged walkers with three rotary-actuated joints in each leg. An eight-leg layout would have no less than 24 actuators. The four- and six-legged versions ... Traversing/rotating frame eight-leg frame walker with single-DOF legs Figure 7-1 3 Eight-leg frame walker with two-DOF legs Chapter 6 Steering History 191 Figure 6-2 Bicycle s...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 11 ppsx
... in the case of sand, because it can’t be scaled. Sand is just sand no matter what size the vehi- cle is (except for tiny robots of course), and mud is still mud. Driving on sand or mud would ... vehicles’ suspension and locomotion systems are frequently quite simple. Figures 8-1 and 8-2 show two examples. Figure 8-1 Four-wheeled horizontal pipe crawler Chapter 8 Pipe Crawlers an...
Ngày tải lên: 10/08/2014, 04:22